Przegląd technik sonarowych pomocnych w nawigacji morskiej
Sonar antykolizyjny dla nawigatorów
Wiele typów sonarów oferowanych jest na rynku morskich urządzeń akustycznych pomocnych w ocenie sytuacji podwodnej. Różnią się one między sobą możliwościami oraz ceną. W procesie wyboru typu urządzenia dla nawigatora istotną sprawą jest świadomość różnic, jakie występują w technice sonarowej. Zadaniem niniejszego opracowania jest wyjaśnienie występujących różnic oraz pomoc kapitanom, armatorom i nawigatorom w procesie podejmowania decyzji dotyczącej wyposażenia statku lub jachtu w sonar nawigacyjny przed jego zakupem.
Wprowadzenie
Sonary patrzące w przód (Forward Looking Sonars – FLS) są przeznaczone do wykrywania przeszkód przed statkiem takich jak mielizny, przeszkody wystające z dna lub przeszkody pływające w toni wodnej jak również do alarmowania podczas automatycznej nawigacji. Jest to stosunkowo nowy typ sonarów (przynajmniej w zastosowaniach nie militarnych). Obecnie na rynku jest dość ograniczona ilość dostępnych sonarów typu FLS.
Oto krótka lista typów:
Modele FarSounder FS-3DT oraz FS-3ER 3D, Interphase Twinscope, Tritech Eclipse, BlueView P900, Marine Electronics 6201 oraz SeaEcho, Reson SeaBat 7128, Echopilot (Gold, Platinum and future 3D), L-3 Communication Subeye.
Produkty te bardzo różnią się specyfikacją techniczną oraz rozwiązaniem konstrukcyjnym. Przez wiele dekad profil dna uzyskiwano za pomocą pionowej echosondy jednowiązkowej ( Single-Beam Echo Sounders SBES). W okresie ostatnich 40 lat do zdejmowania profilu dna popularne stały się echosondy wielowiązkowe (Multi-Beam Echo Sounders MBES). Jednym ze sposobów zrozumienia idei sonarów patrzących w przód (FLS) jest porównanie ich do idei echosond wielowiązkowych (MBES).
Wielu użytkowników dobrze orientuje się w technikach tworzenia map dna morskiego oraz zdejmowaniu profilu dna w oparciu o standardowe echosondy. Jednak niewielu użytkowników orientuje się w możliwościach sonarów typu FLS. Rozważając sonary typu FLS nasuwają się następujące pytania:
– Czy można widzieć dno przed statkiem na taką samą odległość jak jest ono widoczne używając echosond jednowiązkowych/wielowiązkowych (BESS/MBES)?
– Czy można widzieć dno przed statkiem z taką samą jakością (rozdzielczością) jak jest ono widoczne w przypadku echosond jednowiązkowych/wielowiązkowych (BESS/MBES)?
– Na rynku są sonary typu FLS w cenie od 5.000 $ poprzez 80.000 $, aż do 250.000 $. Jakie są różnice pomiędzy tymi systemami?
Być może pierwszym pytaniem powinno być:
Jak zamierza się obserwować dno przed statkiem, aby zapewnić bezpieczną nawigację?
Aby odpowiedzieć na te pytania należałoby na zagadnienie spojrzeć z punktu widzenia użytkownika (co on potrzebuję?) jak również z technicznego punktu widzenia (czego można się spodziewać?). Niniejsze opracowanie jest raczej adresowane do użytkowników, nie porusza ono zagadnień konstrukcyjnych z zakresu sonarów typu FLS.
Jednakże, aby odpowiedzieć na pytanie, „czego można się spodziewać?”, niezbędne są wyjaśnienia na pewnym poziomie technicznym.
Pomimo niezliczonej rzeszy użytkowników echosond i sonarów, nie ma popularnych książek wyjaśniających zagadnienia technologiczne. Dostępna literatura jest raczej przeznaczona dla osób bardziej zaawansowanych profesjonalnie lub dla studentów. W dalszej części omówione zostaną aspekty techniczne w przystępny, popularny sposób.
Określenia techniczne w sonarach
Sonar
Zasada działania sonaru jest podobna do działania radaru, jednak sonar wykorzystuje sygnały akustyczne a nie fale radiowe. Sonar wysyła krótkie impulsy akustyczne o pewnej częstotliwości, a następnie nasłuchuje na powrót ech tych impulsów odbitych od celów podwodnych.
Cel
Cel jest definiowany jako dowolny podwodny obiekt fizyczny, który odbija impulsy akustyczne powracające do sonaru jako echa. Jeśli obiekt jest stosunkowo mały i mocno oddalony od sonaru, można go traktować jako pojedynczy punkt stanowiący mały cel. Jeśli obiekt jest tak duży jak część dna morskiego np. o powierzchni 100m x 100m, można traktować każdą taką powierzchnię jako oddzielny pojedynczy cel. Wówczas całe dno morskie może być traktowane jako obiekt zbudowany z takich pojedynczych powierzchni (celów). Takie rozważanie prowadzi do pytania:
– Co dla sonaru znaczy „mały cel” lub „duży cel”. Jaka cecha sonaru umożliwia rozróżnianie wielkość celu?
Rozdzielczość
Rozdzielczość sonaru to zdolność do rozróżniania dwóch blisko siebie leżących celów. Parametrem charakteryzującym rozdzielczość jest minimalny rozmiar powierzchni celu, jaką sonar jest w stanie odróżnić od otaczających go innych celów podwodnych.
Użytkowników często interesuje czy mogą zobaczyć rzeczywisty obiekt jako pojedynczą wykrytą powierzchnię, lub czy obiekt będzie reprezentowany w formie obrazu składającego się z wielu pojedynczych powierzchni. Im mniejsza pojedyncza powierzchnia celu może być wykryta, tym rozdzielczość jest lepsza a obraz złożony z tych wykrytych elementarnych powierzchni będzie bardziej realistyczny. Technicznie rozmiar takiej elementarnej powierzchni jest definiowany dwoma parametrami: 1) rozdzielczość poprzeczna (wiązka akustyczna) oraz 2) rozdzielczość wzdłużna.
Wiązka akustyczna
Wiązka jest ograniczoną kątowo przestrzenią, w której skoncentrowana jest energia akustyczna. Przetwornik sonaru wysyła wąską wiązkę akustyczną w danym kierunku podobnie jak latarka wysyłająca stożek światła. Szerokość kątowa takiego stożka jest nazywana „szerokością wiązki”. Rys.1 przedstawia naturę wiązki. Wiązka akustyczna dotykając celu stanowiącego część Dna morskiego, „udźwiękawia” go na powierzchni ograniczonej w przybliżeniu przekrojem poprzecznym wiązki w stosunku do jej kierunku. Ten przekrój jest często zwany „śladem wiązki”. Rozmiar tego przekroju jest „rozdzielczością poprzeczną”. Oczywiście im dalej od sonaru, tym większy jest „ślad wiązki” i rozdzielczość poprzeczna jest gorsza.
Rozdzielczość wzdłużna
Drugą rzeczą, która definiuje rozdzielczość sonaru w przestrzeni trójwymiarowej jest rozdzielczość wzdłużna tj. rozdzielczość wzdłuż kierunku wiązki. Rozdzielczość w tym kierunku zależy od struktury impulsu akustycznego oraz od pasma częstotliwości.
Struktura impulsu akustycznego
Na strukturę impulsu składają się: długość impulsu (w milisekundach), częstotliwość środkowa (w kHz) oraz jeśli impuls nie stanowi jednego czystego tonu także szerokość pasma (w kHz). Impuls udźwiękawia przestrzeń wzdłuż osi jego rozchodzenia się na fizycznej długości odpowiadającej iloczynowi: „długość impulsu” x „prędkość dźwięku”. Ogólnie mówiąc, im krótszy impuls tym lepiej rozróżnia się cele o mniejszych wymiarach leżące wzdłuż kierunku rozchodzenia się impulsu. Jednakże impuls nie może być krótszy niż kilka okresów częstotliwości środkowej. W przeciwnym razie jego częstotliwość nie byłaby wyraźnie zaakcentowana w wodzie. Można się więc spodziewać, że im wyższa częstotliwość, tym lepsza rozdzielczość wzdłużna gdyż można zastosować krótszy impuls.
Szerokość pasma częstotliwości
Szerokość pasma częstotliwości impulsu jest właściwością bardziej złożoną. Nie zwracając uwagi na szczegóły techniczne związane z rozszerzaniem pasma częstotliwości impulsu (modulacji częstotliwości) można powiedzieć, że proces ten związany jest z kształtowaniem impulsu w celu poprawienia rozdzielczości tak, aby była lepsza niż w przypadku naturalnej długości impulsu jednoczęstotliwościowego.
Ciekawe, że w naturze występują dobrze znane przypadki wykorzystywania sonaru przez delfiny oraz nietoperze. Te dwa gatunki zwierząt w celu poprawy rozdzielczości wzdłużnej wykorzystują całkowicie różne zasady sonaru. Impuls delfina jest bardzo krótki. Impuls nietoperza jest stosunkowo długi, ale zawierający ekstremalnie szerokie pasmo częstotliwości (impulsy o wyspecjalizowanej modulacji częstotliwości).
Wracając do problemu podwyższania rozdzielczości poprzecznej (tworzenia węższej wiązki akustycznej) oraz uzyskiwania wielu wiązek (skierowanych w różne kierunki) z przetwornika sonarowego. Uzyskuje się to w wyniku specjalnych konstrukcji przetworników.
Pojedynczy przetwornik
Przetwornik stosowany w echosondach jednowiązkowych (SBES) jest w istocie kawałkiem materiału piezoceramicznego. Może on wytwarzać tylko jedną wiązkę akustyczną. Szerokość wiązki zależy od fizycznych rozmiarów przetwornika oraz od jego częstotliwości. Im wyższa częstotliwość, tym węższa wiązka dla danych rozmiarów przetwornika.
Jeśli chce się patrzeć w różnych kierunkach aby widzieć szerszy obszar, jedynym sposobem jest mechaniczne obracanie takim przetwornikiem (skanowanie). Jest to zasada pracy radaru morskiego oraz tańszych sonarów skanujących. Nie można skanować zbyt szybko ponieważ trzeba czekać na powrót echa sygnału.
To nie ma znaczenia w przypadku radarów morskich ponieważ szybkość rozchodzenia się fal elektromagnetycznych wynosi 300,000 km/s, podczas gdy szybkość rozchodzenia się fal akustycznych w wodzie wynosi około 1,500 m/s. Dlatego aby uzyskać echo od celu oddalonego o 100m trzeba czekać 0.2 sek. (0.1 sek. na przelot impulsu do celu oraz 0.1 sek. na powrót echa)
Nasuwa się pytanie: czy to jest długo?
Odpowiedź zależy od zastosowania. Wyobraźmy sobie, że chcemy oglądać obraz z odległości rzędu 150 m ze 100 różnych kierunków. Czas skanowania wyniósłby więc około 20 sekund. Jeśli łódź porusza się z prędkością 3 węzłów (1.5 m/s) i nie próbujemy dokładniej oglądać obiektu o wymiarze kilku metrów „w locie”, to skanowanie mechaniczne może nie stanowić problemu. Jednakże, jeśli łódź porusza się z prędkością 20 węzłów, pozycja łodzi w czasie 20 sek. skanowania zmieni się o 200 m. Więc zawsze musi być wybór kompromisowy pomiędzy czasem skanowania (częstością aktualizacji danych sonarowych), rozdzielczością i obszarem pokrycia.
Złożona antena akustyczna
Drogą wyjścia z tego cząstkowego składania obrazu sonarowego jest złożona antena akustyczna. Złożoną antenę akustyczną stanowi zestaw wielu przetworników. Wykorzystując szereg przetworników sonar może wytwarzać jednocześnie wiele wiązek akustycznych bez potrzeby mechanicznego skanowania. Tak pracuje echosonda wielowiązkowa (MBES), sonar wielowiązkowy oraz system 3D FLS.
Porównując do radaru, podobnie pracują wojskowe radary dalekiego zasięgu oraz inteligentne systemy radiowe. Nowoczesne ultradźwiękowe systemy medyczne także oparte są na sonarach wielowiązkowych oraz złożonych antenach akustycznych. Systemy ze złożonymi antenami akustycznymi wytwarzają jednocześnie, równolegle wiele wiązek lub też szybko wiązka po wiązce (znane jako skanowanie elektroniczne).
Skanowanie elektroniczne zajmuje dodatkowy czas tak jak skanowanie mechaniczne, ale nie ma ruchomych części, co powoduje, że przetworniki są bardziej niezawodne.
Istnieje szczególny system elektronicznego skanowania, niemalże tak szybki jak system jednoczesnego równoległego formowania wielu wiązek akustycznych, stosowany w kamerach akustycznych. Jednak jest to system wymagający przetworników o bardzo szerokim paśmie, pracujących na wysokich częstotliwościach i może osiągać tylko bardzo małe odległości.
Oczywiście złożona antena akustyczna jest znacznie droższa niż pojedynczy przetwornik. Oprócz kosztu elementów ceramicznych należy wziąć pod uwagę także koszt odpowiedniej, wielokanałowej elektroniki.
Jednak rozważając sonar wielowiązkowy ze złożoną anteną akustyczną trzeba mieć świadomość, że jest to najbardziej precyzyjny i najszybszy w działaniu sprzęt.
W związku z tym należy zadać sobie pytanie, czy rzeczywiście potrzebujemy takiego urządzenia.
Odpowiedź znajdziemy w dalszej części rozważań.
Załóżmy, że po rozpoznaniu różnych systemów została podjęta decyzja co do podstawowych wymagań, tzn. akceptujemy wymiary przetwornika, wymaganą rozdzielczość (co jednocześnie oznacza wybór częstotliwości pracy systemu) oraz typ sonaru.
Nasuwa się następne pytanie: na jak dużą odległość system może skutecznie pracować?
Odpowiedź zależy od tego, o jakiej odległości myślimy. Czy myślimy o bezpiecznych odległościach, ale dotyczących głębokości pod kadłubem (jak w echosondzie pionowej), czy o zapewnieniu bezpiecznego dystansu z przodu przed statkiem (jak w sonarach FSL).
Zasięg (odległość) związany jest z propagacją fali dźwiękowej w wodzie. Fala dźwiękowa w wodzie morskiej podlega tłumieniu i rozchodzi się wielotorowo.
Tłumienie
Tłumienie jest to utrata energii akustycznej w wodzie. Im dłuższa jest droga propagacji, tym utrata energii jest większa. Także im wyższa częstotliwość, tym straty są większe. Jeśli potrzebujemy dużej rozdzielczości (wymagana wąska wiązka akustyczna) oraz jednocześnie dużego zasięgu, trzeba wykorzystywać niską częstotliwość oraz duży przetwornik, aby wytwarzał wąską wiązkę na tej częstotliwości. Przykładem takiego systemu jest echosonda wielowiązkowa EM120 firmy Kongsberg Marine. Może ona mapować dno na największej głębokości oceaniczne (11 km Rów Mariański). Częstotliwość 12 kHz, rozmiar anteny akustycznej 7 metrów.
Propagacja wielotorowa
Na płytkiej wodzie dźwięk odbija się zarówno od dna jak i od powierzchni wody. Rozchodząc się w poziomie dźwięk częściej uderza o granice różnych warstw wody niż o dno. Na długiej drodze dźwięk odbija się wiele razy w różnych kierunkach generując na różnych warstwach wody “promienie akustyczne”. W miejscu anteny odbiorczej sonaru te wszystkie promienie mieszają się, więc trudno jest określić głębokość celu analizując taki sygnał. (Jest to analogia do sytuacji gdy próbujemy przy pomocy latarki patrzeć przez długą, wąską szczelinę). Konstruktorzy sonarów często określają maksymalną odległość, jaką można osiągnąć w poziomie na 10 – 12 krotnej głębokości akwenu.
To nie jest dokładne ograniczenie, ponieważ zasięg zależy także od twardości dna (zdolność do odbijania), jak szorstka jest powierzchnia oraz jak zaawansowana technologicznie jest obróbka sygnału. Ale z pewnością trudno jest uzyskiwać profil dna poza zakresem odpowiadającym 10-krotnej głębokości. Na taką odległość zwykle można tylko wykryć coś i powiedzieć, że na tym kierunku jest coś, co odbija sygnał. Nie można powiedzieć dokładnie na jakiej głębokości jest cel.
Posługiwanie się echosondami wielowiązkowymi
Pionowa echosonda wielowiązkowa 2D
Wykonując pomiary batymetryczne (profilowanie dna), echosonda MBES generuje wachlarz wiązek jak pokazano na rysunku 2. Wiązki patrzą w dół poprzecznie do ruchu statku tworząc zestaw dwuwymiarowy (2D). Każdy ping sonarowy określa głębokość na przekroju dna poprzez obrys śladu na dnie (różowy). Całkowita długość tego przekroju zwykle wynosi 2 – 3 razy średniej głębokości.
Poruszając się w przód, pomierzone głębokości są składane po każdym pingu w mozaikę budując pas mapy dna. Po angielsku ten pas jest zwykle zwany „swath” (pokos). Do mozaikowania potrzebna jest dokładna znajomość pozycji statku i sonaru w odniesieniu do Ziemi. Stąd w uzupełnieniu do sonaru wymagany jest GPS oraz czujnik ruchu kołysań bocznych, wzdłużnych i pionowych statku.
Statek pomiarowy porusza się wzdłuż tras pomiarowych (tam i z powrotem), aby pokryć pasami całą mierzoną powierzchnię dna. Im szerszy pas, tym mogą być większe odległości pomiędzy trasami pomiarowymi (transektami) i mniej czasu trzeba poświęcić na pomiary danego obszaru dna. Dla klienta oznacza to, że im szerszy jest pas pokrycia pojedynczego pingu, tym tańsze będą pomiary. Należy zwrócić uwagę, że końcowa mapa dna będzie trójwymiarowa (3D), ale budowana jest z plastrów dwuwymiarowych.
Echosonda 2D pionowo patrząca w przód
Jeśli wachlarz wiązek zostanie ustawiony wzdłuż osi statku i jednocześnie zwrócony w przód, echosonda będzie rysować pionowy przekrój dna przed statkiem jak na rysunku 3. Jest to obraz dwuwymiarowy przekroju dna wzdłuż kursu statku. Zestaw wiązek jest pochylony w kierunku dna. Górna wiązka niemal ślizga się po powierzchni akwenu (w poziomie), a pozostałe bardziej zwracają się kolejno w kierunku dna. Jeśli wszystkie wiązki mają tę samą szerokość, wówczas im większy dystans, tym większy będzie ślad wiązki akustycznej.
Kolor ciemno-niebieski oznacza słabe echa, kolor czerwony oznacza głośne echo. Dno nie wygląda jak linia ciągła, ponieważ niektóre powierzchnie dna dobrze odbijają sygnał akustyczny a inne słabiej. W odległości mniejszej niż 10 – 12 głębokości wody pod statkiem głębokość dna przed statkiem może być zmierzona. W większej odległości trudno jest określić głębokość akwenu. Możliwe jest jedynie przypuszczenie, że jasny wyskok na ekranie w większej odległości stanowi silny reflektor, którym może być przeszkoda nawigacyjna lub wystająca z dna, niezbyt wysoka w porównaniu do otaczającego dna skała.
Można zadać pytanie: czy taki rezultat może zapewnić bezpieczną nawigację?
Jeśli byłaby możliwość zmniejszenia szybkości lub zatrzymani statku, odpowiedź byłaby „tak”.
Jeśli jednak chcielibyśmy zobaczyć, co jest po lewej lub po prawej stronie tego pionowego przekroju i znaleźć drogę dla manewru w celu uniknięcia kolizji, odpowiedź byłaby „nie”. Do tego potrzebny byłby obraz trójwymiarowy.
Skanowanie mechaniczne
Jest możliwe wykorzystanie skanowania mechanicznego wiązkami akustycznymi i budowania obrazu trójwymiarowego 3D. Ale to oznacza, że na każdy oddzielny przekrój trzeba przeznaczyć pewien czas. Przykładowo, 30 przekroi o zasięgu 450 m każdy wymagałoby czasu 20 sekund aby zbudować z nich obraz 3D.
Ponadto przekroje pionowe nie będą zgrane, ponieważ statek się porusza. W związku z tym potrzebny byłby dodatkowy czas na obróbkę danych.
Biorąc pod uwagę, że w ciągu 20 sekund statek płynący z szybkością 10 węzłów pokona dystans 100m, takie rozwiązanie byłoby praktycznie nie do zaakceptowania dla nawigatorów dużych lub średniej wielkości statków. Byłoby może akceptowane jedynie przez jednostki rekreacyjne.
Echosonda 2D poziomo patrząca w przód
Załóżmy, że wiązka jest ustawiona w pozycji poziomej i jest pochylana w pionie. Załóżmy też, że wiązki są wystarczająco wąskie i są pochylone w kierunku dna tak, aby zapewnić wystarczająco mały ślad wiązki. Rezultat jest widoczny na rysunku 5. To jest podobne do echosondy wielowiązkowej patrzącej w dół. Można pomierzyć głębokość pasa dna pokrytego śladami wiązek.
Jeśli statek porusza się prosto do przodu to wyniki z ostatniego pingu oraz z pingu przedostatniego mogą tworzyć mozaikę dna 3D (wymagane są czujniki pozycji statku oraz sonaru). Jeśli zostanie wykonany ostry skręt, to całe dno przed statkiem staje się nowym dnem, które wcześniej nie było sondowane i dlatego mozaikowanie musi rozpoczynać się od początku. Dodatkowo w tym podejściu można dostatecznie szerokimi pionowymi wiązkami pochylać w dość płytkim kącie tak, aby uzyskiwać szeroki pas dna przed statkiem podczas pojedynczego pingu.
Nie ma możliwości pomiaru głębokości dla każdego punktu dna w dużej odległości, ponieważ ślad wiązki jest zbyt duży, ale taka prezentacja (styl radarowy) jest użyteczna dla alarmowania o potencjalnych przeszkodach. Nawet bez szacowania głębokości użytkownik ma świadomość, że duży jasny wyskok na ekranie jest spowodowany silnym odbiciem od prawdopodobnej przeszkody. Trzecim możliwym przybliżeniem jest skanowanie pionowe wąską wiązką ponad omówionym zobrazowaniem 2D i w ten sposób utworzenie zobrazowania dna w 3D. Jednak ponownie, skanowanie (mechaniczne albo elektroniczne) zabiera dodatkowy czas.
Kombinacja skanowania pojedynczą wiązką w pionie i w poziomie
Takie skanowanie zastosowała firma Interphase w swoich sonarach Twinscope. Przetworniki w tych sonarach składają się z dwóch rzędów przetworników. Jeden rząd skanuje pionowo wąską wiązką odwzorowując pionowy przekrój dna bezpośrednio przed statkiem, podczas gdy drugi rząd przetworników skanuje poziomo wąską wiązką odwzorowując poziomy obraz dna przed statkiem.
Ponieważ oba procesy skanowania zajmują czas, użytkownik często postępuje tak, że włącza tryb skanowania pionowego, ustawia alarm głębokości i płynie do momentu aż zadziała alarm głębokości. Wówczas przełącza w tryb skanowania poziomego i poszukuje drogi ominięcia przeszkody.
Sonar 3D patrzący do przodu
Wyobraźmy sobie sonar, który wytwarza zestaw wiązek 3D jak pokazano na rysunku 8. Taki sonar w wyniku pojedynczego pingu może tworzyć rzeczywisty, trójwymiarowy obraz dna przed statkiem bez potrzeby pochłaniania czasu na oddzielne skanowania.
Jest to najszybszy, ale jednocześnie bardzo złożony sposób patrzenia w przód. Przykładem sonaru patrzącego w przód, dającego rzeczywiste zobrazowanie 3D jest sonar firmy FarSounder FS-3DT.
Wykryty wrak statku jest prezentowany przy pomocy kul w kolorach odpowiadających intensywności echa (wyraźnie widoczny mostek statku wystający około 10 m ponad dno). Wrak jest dużym obiektem w odległości 165m. Mały obiekt w żółtym kolorze w odległości 83m jest małą skałą. Biała siatka “druciana” pokazuje kąt w poziomie, odległości w poziomie i przekrój głębokości w dół do 50 m.
Jak poprzednio, można tworzyć mozaikę obrazów. Ale w tym systemie mozaika jest tworzona natychmiast „bezszwowo” nawet, gdy statek skręca.
Ogólnie to, czego użytkownik może się spodziewać od sonaru patrzącego do przodu można wyrazić następująco:
- Zasięg wykrywania typowych nawigacyjnych przeszkód (bez oszacowania głębokości):
Zasięg mógłby być dostatecznie duży, ale jest ograniczony rozmiarami miejsca do instalowania przetwornika. Jeśli byłoby miejsce do zainstalowania przetwornika o rozmiarach 0.5 m, można osiągnąć zasięg ponad 1000m. - Zasięg horyzontalny, w ramach którego można oszacować głębokość dna:
Z reguły jest ograniczony do odległości równej około 10 krotnej ogólnej głębokości dna - Dokładność pomiaru głębokości dna oraz rozdzielczość dna
Dokładność może być dostatecznie wysoka (bliska dokładności echosond hydrograficznych), w zakresie odległości w poziomie równej dwukrotnej głębokości ponieważ ślad wiązki jest w tym rejonie dostatecznie mały. Ale praktyczna wysokość tej dokładności nie jest tak istotna gdyż taka odległość nie stanowi krytycznego obszaru z punktu widzenia bezpieczeństwa, ponieważ byłoby za późno, aby uniknąć przeszkody w tak małej odległości.
Dokładność maleje w miarę wzrostu odległości w poziomie. - Częstość aktualizacji
W sonarach FLS o rzeczywistym zobrazowaniu 3D aktualizacja jest najszybsza z możliwych, ale nie może odbywać się częściej niż czas dwukrotnego przelotu impulsu, który dla zasięgu 1000m wynosi 1.7 sekundy.
W sonarach skanujących FLS aktualizacja jest przynajmniej kilka razy wolniejsza (przy pracy na tym samym zakresie). - Graficzny interfejs użytkownika
To jest istotna właściwość, ponieważ łącznie z alarmem, jest tym, co motywuje użytkownika do rozpoczęcia manewru ominięcia przeszkody. Takie typowe okno graficzne zawiera:
a) Długi zasięg (ponad 10 krotną głębokość) sektora widzenia, zobrazowanie w stylu radarowym z automatycznym wykrywaniem celów (potencjalnych przeszkód).
b) Widok dna w zobrazowaniu 3D aż do 10-12 krotnej głębokości wody, z automatycznym ostrzeganiem o głębokości niebezpiecznej.
Wymagania użytkownika
Poniższa tabela wyjaśnia krytyczne parametry w sonarach FLS z punktu widzenia użytkownika.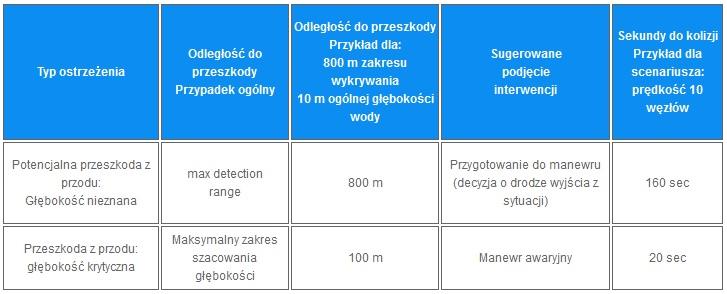
Z tabeli wynika, że czas jest krytycznym parametrem.
Należy także wziąć pod uwagę, że czas na podjęcie bezpiecznego manewru wynosi przynajmniej 3 x długość statku / prędkość.
Ostatni przypadek masowca “Shen Neng 1”, który osiadł na Australijskiej Wielkiej Rafie Koralowej w kwietniu 2010. Statek o długości 225 m płynący z prędkością 12 węzłów, na wykonanie bezpiecznego manewru potrzebował 110 sekund czasu. Dla porównania jednostka o długości 6 m potrzebuje na manewr tylko 4 sekund. Rozważmy bliżej przypadek statku pasażerskiego „Royal Majesty”, który osiadł na mieliźnie w 1995 roku w pobliżu wyspy Nantucket, Massachusetts.W tym przypadku statek znalazł się poza kursem z powodu problemów z GPS. Ścieżka ostatnich 5 mil morskich “Royal Majesty” pokazana jest na rysunku 10.
Gdyby rzeczywista pozycja statku była znana, wówczas nawigator patrząc na mapę zorientowałby się, że statek wejdzie na niebezpieczną mieliznę. Ale korzystając ze standardowych map z kolorowymi konturami nie jest całkowicie jasne, jak niebezpieczna jest sytuacja.
Aby wyjaśnić sprawę: dane batymetryczne NOAA wewnątrz rejonu XY oznaczonego na czerwono są zaprezentowane w zobrazowaniu trójwymiarowym w kolorach od czerwonego do niebieskiego na rysunku 11. Z tego rysunku widać jak dramatycznie podnosi się dno. Głębokość wody (ponad 14 m) pozostaje do ostatniego momentu i nagle staje się bardzo płytka na przestrzeni ostatnich 600m drogi statku.
Prędkość “Royal Majesty” wynosiła 14 węzłów, a więc przebycie drogi 600 m zajęło tylko 60 sekund. Można wyobrazić, że ten statek jest wyposażony w sonar z zakresem wykrywania 800 metrów, oraz z 60 stopniowym kątem widzenia w poziomie. Pole widzenia takiego sonaru jest naniesione na mapę batymetryczną NOAA na rysunku 12 w widoku z góry.
Widać wyraźnie, że statek Royal Majesty o całkowitej długości 173 m w pozycji jak na rysunku 12 miałby dostatecznie dużo czasu na wykonanie manewru uniknięcia kolizji z mielizną gdyby miał możliwość wykrycia sonarem FLS krawędzi mielizny.
Następny rysunek prezentuje przykład jak sonar FarSounder widziałby te podwodną scenę:
Na echogramie widoczna jest wyraźnie ostra krawędź mielizny. Alarm zostałby automatycznie uruchomiony. Więc sonar FLS jest cennym urządzeniem pozwalającym uniknąć kolizji lub wejścia na mieliznę.
Wnioski
Praktycznie podstawą do wypracowania decyzji o wyborze typu sonaru antykolizyjnego (FLS) jest znajomość potrzeby reakcji nawigatora na informacje i ostrzeżenia przekazywane przez sonar.
Wariant I
- Czy jest się właścicielem / armatorem dużego statku ?
- Czy woli się wykonywać manewr uniknięcia przeszkody bezpośrednio po jej wykryciu, zamiast zatrzymania się lub zwolnienia prędkości w celu zastanowienia się, która droga byłaby najlepsza, aby uniknąć kolizji ?
- Czy wymagane jest utrzymywanie stałej prędkości w celu oszczędzania czasu i paliwa ?
Jeśli odpowiedź brzmi “tak” na wszystkie trzy pytania, wówczas najlepszą opcją jest sonar o rzeczywistym zobrazowaniu 3D.
Wariant II
- Czy jest się właścicielem stosunkowo małej jednostki rekreacyjnej ?
- Czy można pozwolić sobie na zatrzymanie lub zmniejszenie prędkości w celu podjęcia decyzji o wyborze drogi do ominięcia wykrytej przeszkody ?
- Czy wydłużenie czasu podróży nie jest bardzo istotne?
Jeśli odpowiedź brzmi “tak”, to można dokonać wyboru tańszego sonaru skanującego o zobrazowaniu 2D.
W każdym wypadku sonary typu FLS czynią nawigację bezpieczniejszą.
Opracowanie firmy ESCORT SP. Z O.O. oparte o materiał firmy FarSounder, Inc.