
1. Kontrola pracy echosondy GS+ (Online )
Kontrola pracy echosondy GS+ odbywa się z poziomu oprogramowania QINSY. Do przesyłania poleceń takich jak start/stop (pinging), test (Test pattern), wzmocnienie (power), długość czasu trwania impulsu (Pulse Length), wzmocnienie sonaru (sidescan gain) oraz filtrów akwizycyjnych służy zakładka „Control”
Okno Controllera – zakładka Settings – Echosounder Settings – GS+ MBES Port / Starboard – Control

Ogólny opis filtrów akwizycyjnych:
|
Używane są w celu redukcji gęstości danych. !!! Pogarszają dane sonarowe i powodują, że przefiltrowane przez nie dane nie są nagrywane. |
|
Filtr redukujący dane w kolumnie wody. Można wprowadzić ręcznie wartość głębokości do jakiej będzie działał. Ustawiony na automatic bazuje na średniej zmierzonej głębokości wody – nie powinien być używany tam gdzie dno zmienia się bardzo szybko oraz na bardzo płytkich wodach |
Domyślne ustawienia parametrów pracy sondy:
Range – w zależności od głębokości akwenu pomiarowego
Sidescan gain – 2
Pulse Length – 1
Power – 4 lub 5(dla płytkich wód) – nie należy redukować go w trakcie pomiarów
Filtry akwizycyjne można ustawić jedynie w trybie online. W trybie replay zakładka Control nie pojawia się.
2. Bramki oraz filtry redukujące dane batymetryczne
! Poniższe ustawienia flagują jedynie dane przychodzące – nie usuwają ich. Podczas ponownego odtwarzania danych, zastosowane wcześniej filtry oraz bramki można wyłączyć lub zmienić ich parametry.
Okno Controllera – zakładka Settings – Echosounder Settings – GS+ MBES Port / Starboard
Bramki redukujące dane wychodzące poza ustalony obszar głębokościowy, zasięgowy, sektorowy („depth, range, sector outside”)
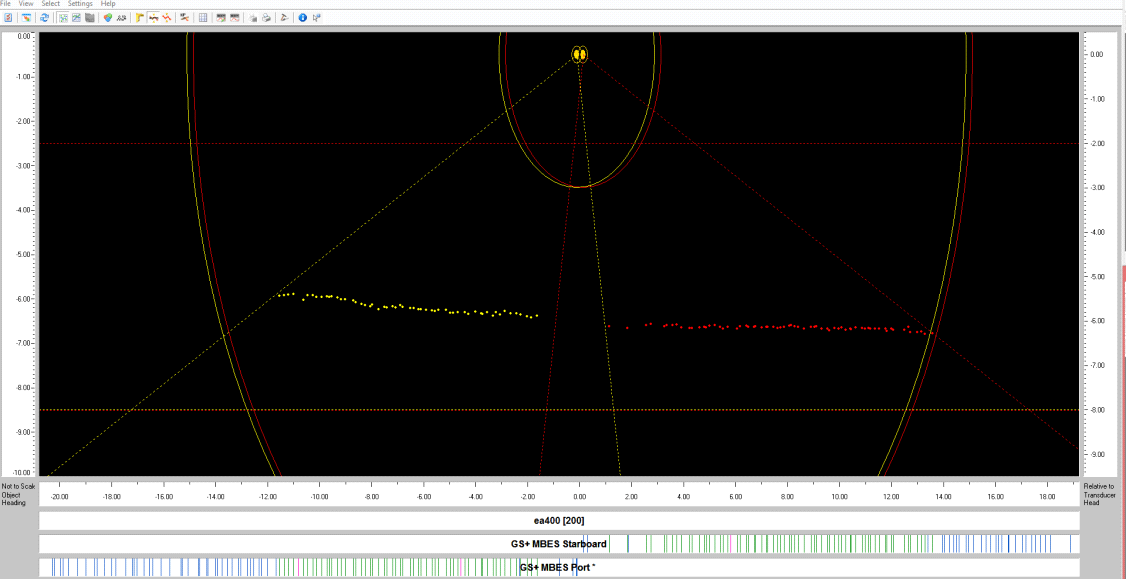
Bramki wycinające słabsze echa (intensity, quality outside) oraz bramka wycinająca dane nie spełniające norm kategorii IHO (TPE exceeds).
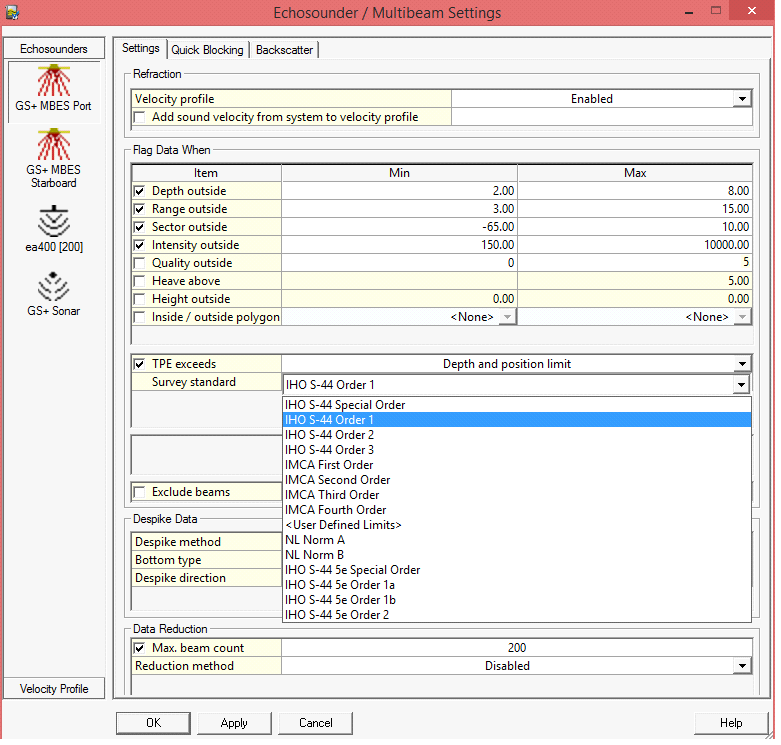
Redukcja danych poprzez zastosowanie filtrów „despajkowych” – Despike Data Filters oraz redukcji wiązek – Data reduction.
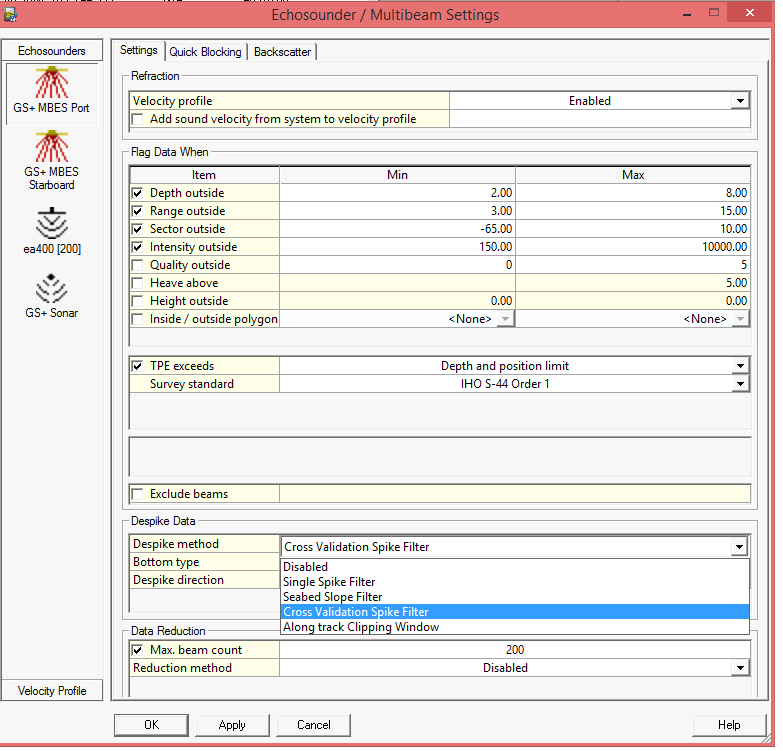
Usuwanie skoków pozycji (błędnych danych) ma duże znaczenie podczas pracy online. Bardzo użyteczne są metody wycinania tzw “spików” zarówno w bocznej linii rozchodzenia się swatha oraz w trakcie zliczania sygnału podczas rychu jednostki. Filtry te wycinają “spajki” jak również ograniczają nagrywanie danych spoza ustawionego zakresu.
Filtr Single spike filter – usuwa pojedyncze “spajki” których wartość różni się znacznie od wartosci sąsiednich głębokości – filtr działa od lewej do prawej strony swatha analizując wartości głębokości.
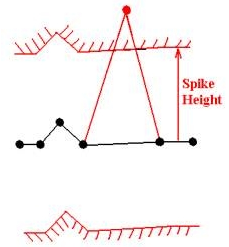
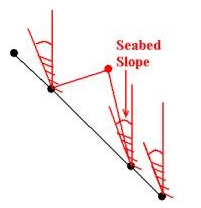
Seabed Slope Filter – sprawdza kąty pomiędzy sąsiednimi wiązkami, rozpoczynając działanie od środka swatha. Jeżeli wartość kata jest mniejsza niż wprowadzona wartość wówczas pomiar jest odrzucany.
Filtr Along track Cliping Window to filtr (wirtualne okienko), które podąża za swathem ustawiając wirtualne wartości pingu referencyjnego, bazując na wartości pingu poprzedniego. Jeżeli wartość kolejnego pingu nie ma snesu w porównaniu z poprzednim wówczas filtr wycina taki ping. Idea jest taka, że oczekuje się, aby każdy kolejny ping był podobny do poprzedniego, przyjmując, że dno nie zmienia się aż tak bardzo. Parametr Bin Size to rozpiętość (bramka) w metrach, w której analizowane są wartosci głebokości. Im mniejsza wartosć tym filtr lepiej będzie śledził iw wycinał pingi błedne, natomiast może także wyciąć prawdziwe przedmioty leżące na dnie. Parametr Learn Rate określa w jakim stopniu wartość pingu kolejnego, ma być porównywana z wartością pingu kolejnego. 100% oznacza, że nowy ping zastąpi całkowicie ping referencyjny, natomiast wartosć zero oznacza, że filtr refrencyjny będzie uznany za właściwy. Typowe ustawienia parametrów obrazują obrazki poniżej.

Filtr Cross Validation Spike Filter ustawiany jest w zależności od typu dna (płaskie, normalne, pagórkowate). Wartością odniesienia dla bramki filtrującej jest średnia głębokość. Należy mieć na uwadze, że ustawienie np. Typu dna na płaskie dno, może skutkować wycięciem nawet małych zmian. Filtr działa zarówno w górę jak i w dół. Typowe ustawienia parametrów obrazują obrazki poniżej.

3. Kalibracja echosondy
KROK 1 – należy zaprojektować odpowiednie profile sondażowe – niezależnie dla każdej głowicy (lewej i prawej) i nagrać dane z przejazdów:
Można wyłączyć jedną głowicę podczas kalibracji, co jest użyteczne zwłaszcza na ograniczonym obszarze – rzeka, kanał. Poniżej przedstawiony został przykład dla głowicy prawej.
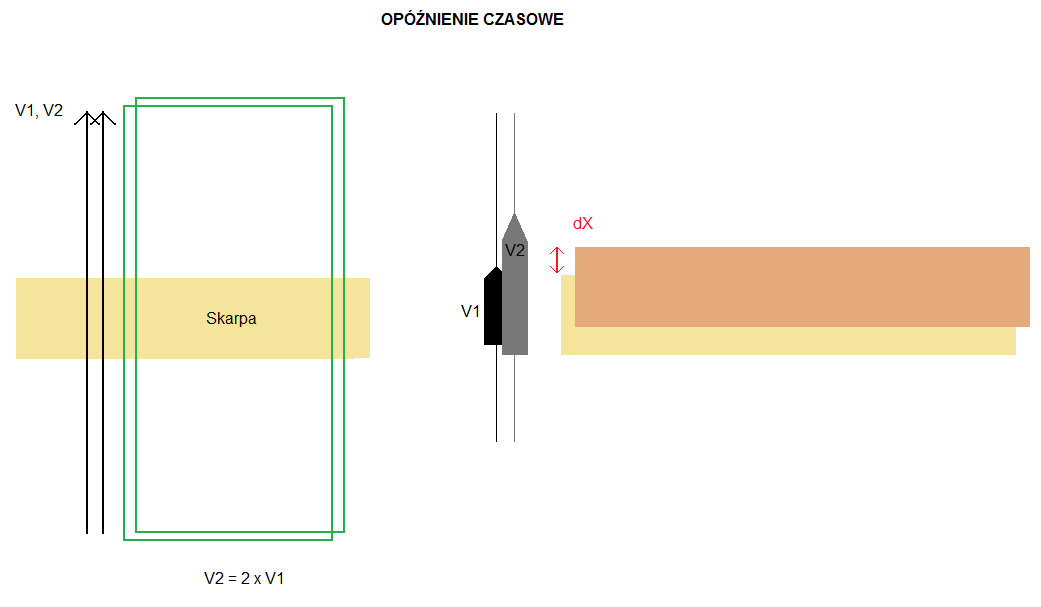
– do sprawdzenia wartości poprawki na późnienie czasowe należy przepłynąć nad charakterystycznym obiektem lub nad skarpą dwa razy w tym samym kierunku z dwoma różnymi prędkościami.
|
Wartość opóźnienia czasowego, wprowadzanego do systemu można obliczyć ze wzoru:
Gdzie: Δt = opóźnienie czasowe ΔX – zmierzona różnica odległości pomiędzy np. wierzchołkiem skarpy V2 i V1 – prędkości przepłynięcia Np. dla V1=3w(1,5m/s) i V2=6w(3m/s), przy oszacowanym ΔX=1m Δt=0,66 sekund |
Opóźnienie czasowe eliminowane jest poprzez użycie adeptera TTL (PPS).
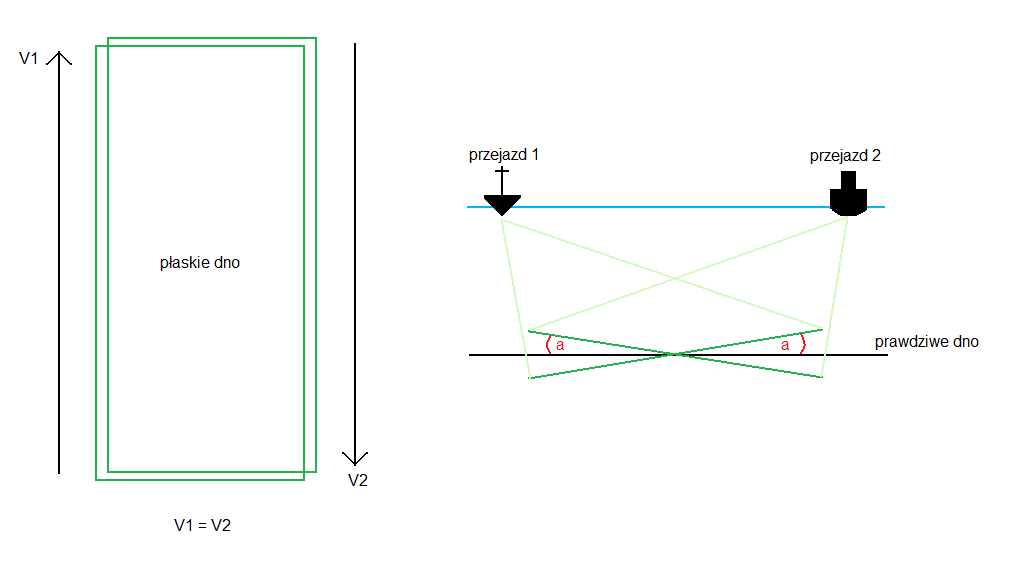
– do sprawdzenia wartości poprawki kątowej na odchylenie w osi kołysania (roll):
2 profile w przeciwnym kierunku nad płaskim dnem – przejście po profilach z jednaką prędkością
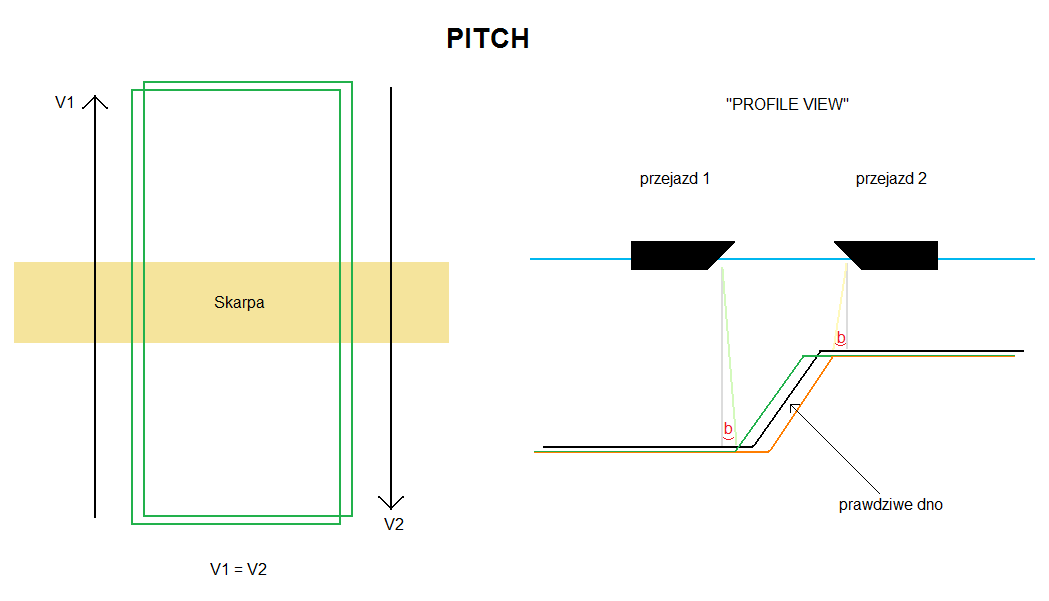
– do sprawdzenia wartości poprawki kątowej na odchylenie w osi kiwania (pitch):
2 profile w przeciwnym kierunku nad skarpą lub dużym obiektem – przejście po profilach z jednaką prędkością
(Przetworniki zamontowane na fabrycznej płycie (V-plate) wraz z czujnikiem ruchu są mechanicznie spozycjonowane na tej samej płaszczyźnie horyzontalnej, więc na płytkich wodach poprawkę na „pitch” można przyjąć jako zero.)
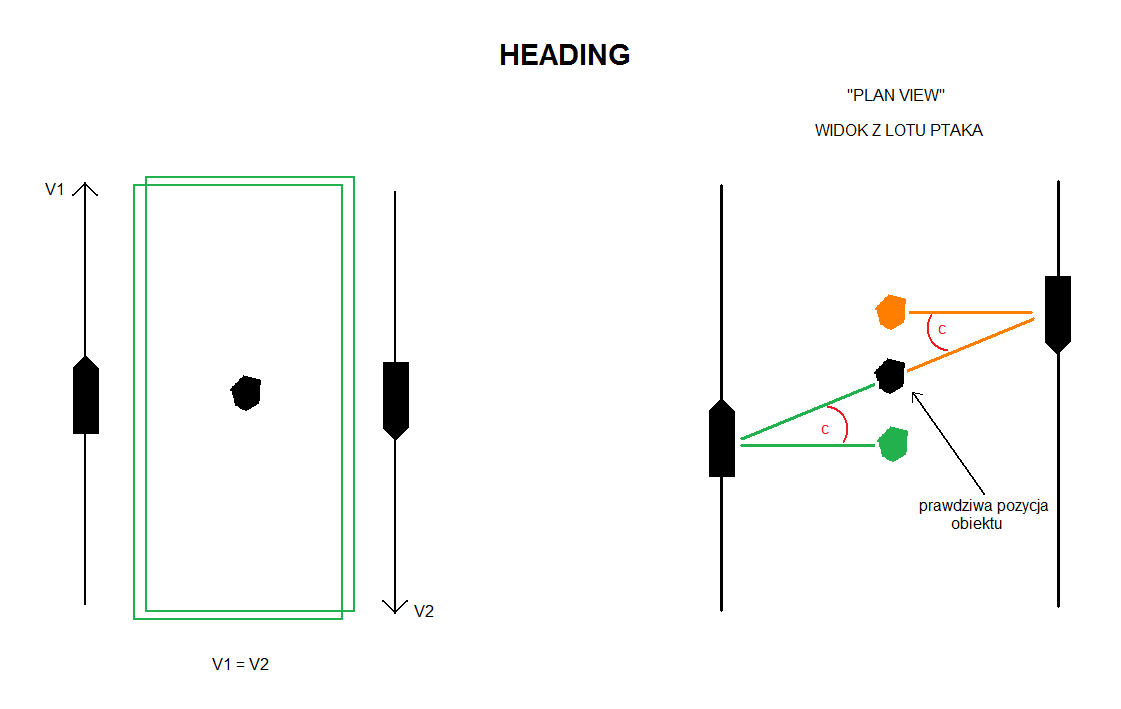
– do sprawdzenia wartości poprawki kątowej na odchylenie w osi myszkowania (yaw/heading):
2 profile w przeciwnym kierunku nad skarpą lub charakterystycznym obiektem leżącym na dnie – przejście po profilach z jednakową prędkością.
Przy przejściach przeciwległych podczas szukania poprawki na „yaw” należy mieć już dane poprawione o opóźnienie czasowe oraz o poprawkę na „pitch”.
KROK 2 – w Validatorze (processing Manager) należy wybrać nagrane przejazdy (odpowiednio dla każdej głowicy) i zaznaczając odpowiednie fragmenty pasa dna przejść w tryb kalibracji.
Validator – zakładka Settings – pole Viewed Data = Validated
__________________________________________________________________________________
! WAŻNE : POPRAWKA NA OPÓŹNIENIE CZASOWE
W przypadku gdy zaistnieje konieczność wprowadzenia poprawki, wówczas należy wykorzystać filtr Apply Latency w Analizatorze uruchamianego z poziomu Replay.
Filtry dostępne w Analizatorze.
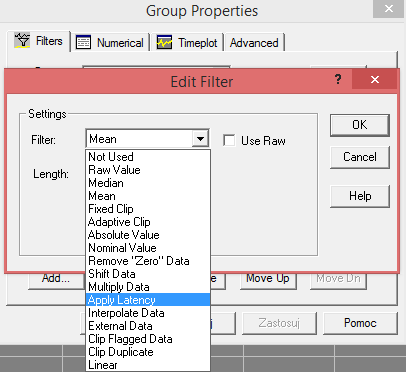
Uwaga: Poprawkę Latency wprowadzamy w analizatorze po czym trzeba wykonać replay danych.
_________________________________________________________________________________
Kalibracja na roll:
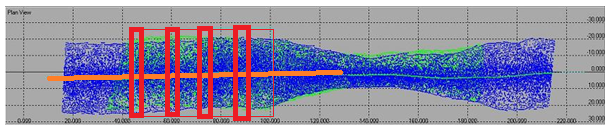
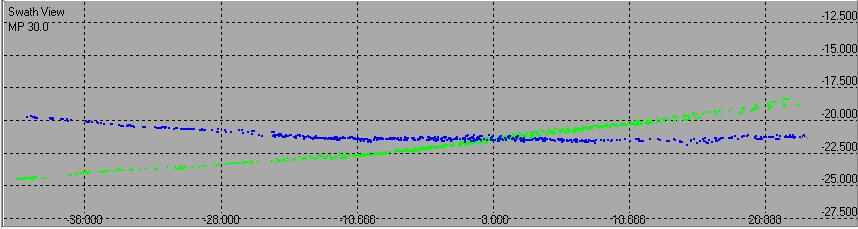
W widoku „Plan view” (widok z góry) mając widoczne pasy pokrycia z dwóch przejazdów (przejazd niebieski i zielony) , należy narysować linię referencyjną (przy użyciu polecenia user defined line w zakładce settings) biegnącą przez środek obszaru z płaskim dnem (pomarańczowa linia) a następnie przy użyciu polecenia pick scroll box z zakładki Scroll narysować ramki (czerwone) w poprzek linii referencyjnej tak aby objąć całą szerokość pasa pokrycia dna, a następnie wejść w tryb kalibracji.
Zaznaczając pole „roll” należy przeprowadzić kalibrację (automatyczną lub ręczą) tak, aby jak najbardziej poprawnie określić poprawkę kątową. W widoku Swath View (poniżej), przed określeniem poprawki pokazana jest rozbieżność kątowa pomiędzy danymi. Należy określić taki kąt, aby po jego wprowadzeniu linie pasów pokrycia dna zbiegły się.
Kalibracja na pitch:

W widoku „Plan view” (widok z góry) mając widoczne pasy pokrycia z dwóch przejazdów (przejazd niebieski i zielony) , należy narysować linię referencyjną (przy użyciu polecenia user defined line w zakładce settings) biegnącą przez środek obszaru nad skarpą lub obiektem (pomarańczowa linia) a następnie przy użyciu polecenia pick scroll box z zakładki Scroll narysować ramkę (czerwona) wzdłuż linii referencyjnej tak aby objąć wąski pas pokrycia dna, a następnie wejść w tryb kalibracji.
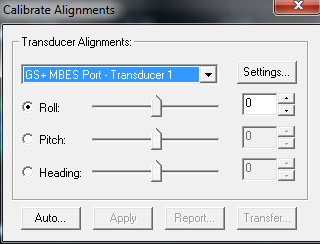
Validator – zakładka Calibrate – pole Transducer Allignement
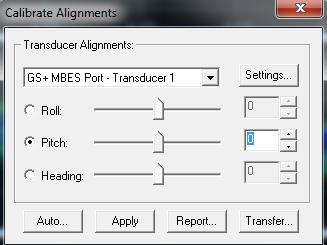
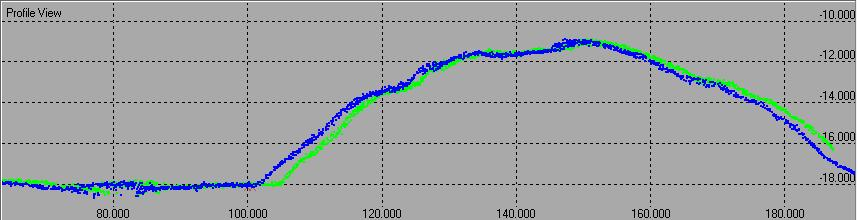
Zaznaczając pole „pitch” należy przeprowadzić kalibrację (automatyczną lub ręczą) tak aby jak najbardziej poprawnie określić poprawkę kątową. W widoku Profile View (poniżej), przed określeniem poprawki pokazana jest rozbieżność kątowa pomiędzy danymi. Należy określić taki kąt, aby po jego wprowadzeniu wybrane linie dna zbiegły się.
Kalibracja na yaw/heading:
W widoku „Plan view” (widok z góry) mając widoczne pasy pkrycia z dwóch przejazdów (przejazd niebieski i zielony) , należy narysować linię referencyjną (przy użyciu polecenia user defined line w zakładce settings) biegnącą przez środek obszaru nad skarpą lub obiektem (pomarańczowa linia) a następnie przy użyciu polecenia pick scroll box z zakładki Scroll narysować ramkę (czerwona) wzdłuż linii referencyjnej tak, aby znalazła się ona w płaskie pokrycia zarówno pierwszego jak i drugiego przejazdu, a następnie przejść w tryb kalibracji.
Validator – zakładka Calibrate – pole Transducer Allignement
Zaznaczając pole „heading” należy przeprowadzić kalibrację (automatyczną lub ręczą) tak, aby jak najbardziej poprawnie określić poprawkę kątową. W widoku Profile View (poniżej), przed określeniem poprawki pokazana jest rozbieżność kątowa pomiędzy danymi. Należy określić taki kąt, aby po jego wprowadzeniu wybrane linie dna zbiegły się.
Widok obrazujący rozbieżność linii, zarówno dla błędu kątowego przy określaniu poprawki na pitch jak i na heading, jest podobny. Natomiast inny jest algorytm wyliczania poprawki (inna płaszczyzna odniesienia i oś obrotu – dla poprawki na pitch, dane kalibrowane są w płaszczyźnie wertykalnej, natomiast przy kalibracji na heading, w płaszczyźnie horyzontalnej.
KROK 3 – wprowadzenie wartości poprawek kątowych do bazy danych
Wartości poprawek można wprowadzić ręcznie do bazy danych ustawień parametrów głowicy lewej i prawej poprzez dodanie zmierzonych wartości do istniejących wartości odchyleń kątowych – Roll offset, Pitch offset, Heading offset.
 lub
lub 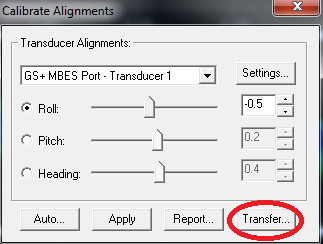
Można również wykorzystać opcję transfer i automatycznie dodać wartości określonych poprawek do ustawień parametrów w bazie danych.
4. Przygotowanie danych na planie sondażowym
Zakładając, że mamy przefiltrowane i poprawione o pływ dane, to, aby wygenerować je na planie należy najpierw:
Krok 1: przygotować dane batymetryczne w formie warstwy punktów głębokości. W tym celu zaznaczamy plik z danym danej linii i tworzymy powierzchnię nawigacyjną:
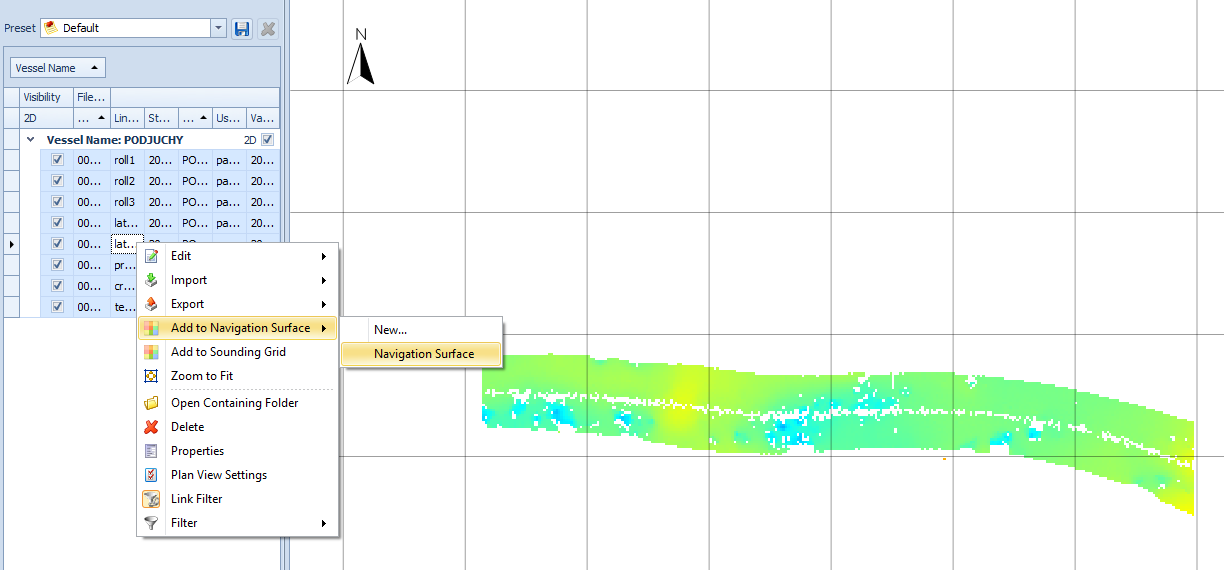
Powierzchnia nawigacyjna to model dna, czyli GRID.
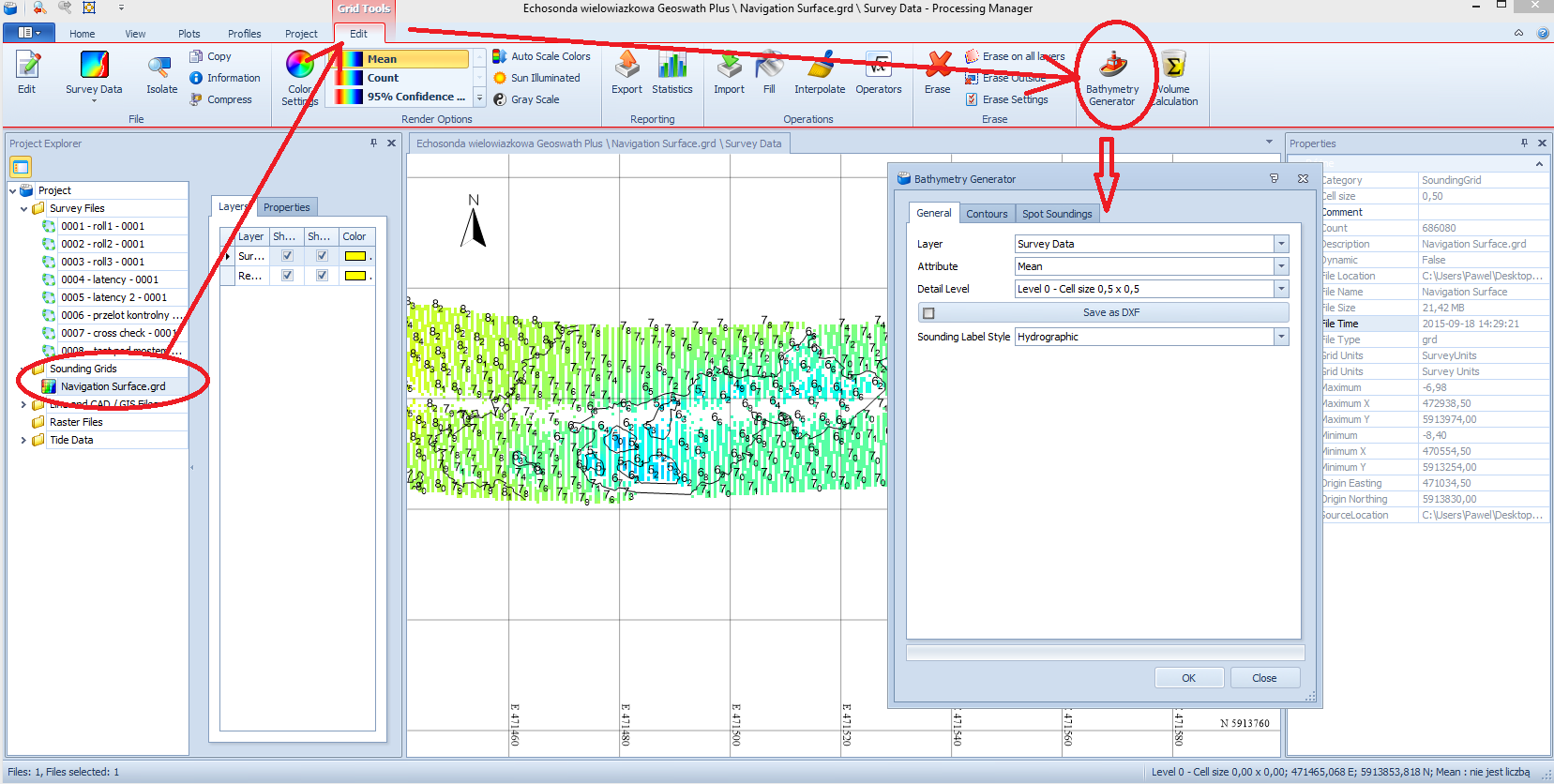
Krok 2 – Zaznaczamy stworzoną powierzchnię (plik GRID) i generujemy punkty batymetryczne oraz izobaty poprzez wejście w zakładkę Grid Tools i polecenie Bathymetry Generator, a następnie dobieramy odpowiednie parametry rysowania izobat oraz punktów głębokości.
Krok 3 – Gdy gotowe, przygotowujemy planszet w zakładce Plots – Edit Plots Templates
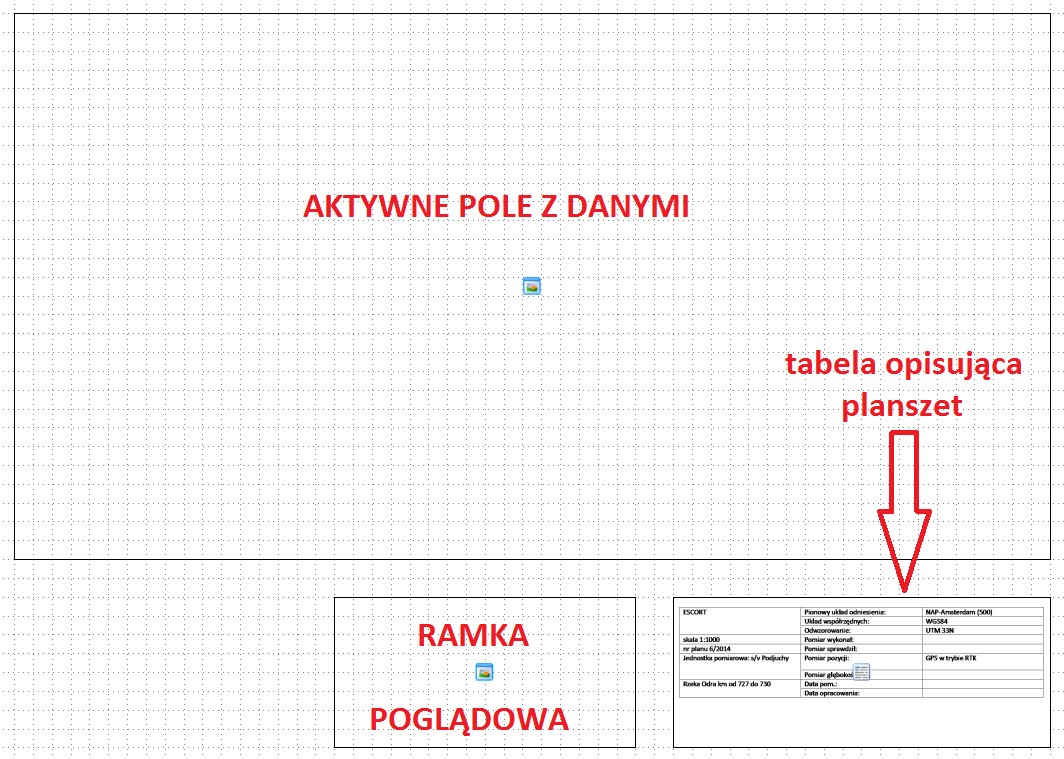
Krok 4 – Następnie pozycjonujemy ramkę reprezentującą AKTYWNE POLE Z DANYMI na mapie.
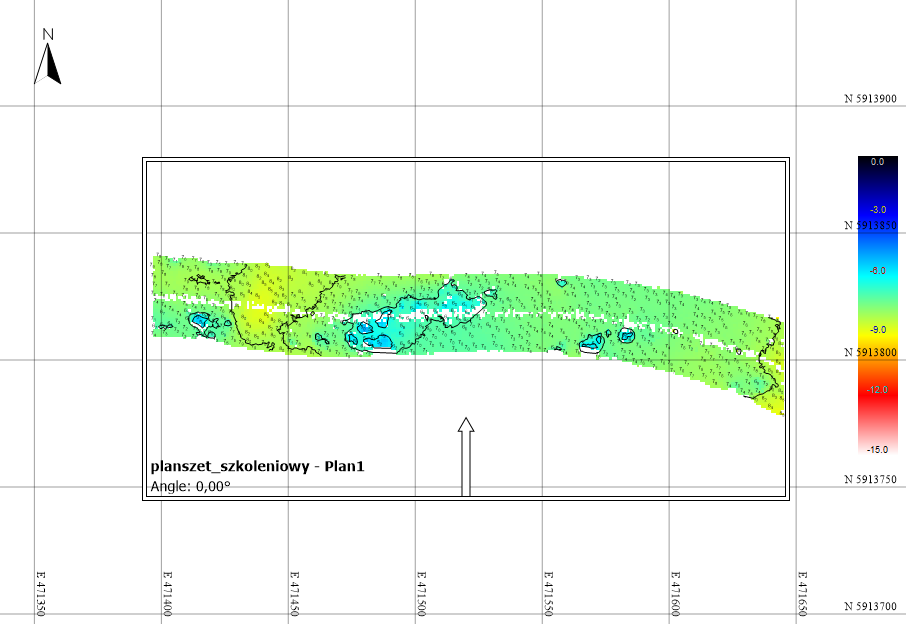
Planszet możemy wydrukować w formacie PDF:
ŻYCZYMY MIŁEJ PRACY HYDROGRAFICZNEJ